1. Mis on robot? Esimene robot maailmas.
Robot on mehaaniline või programmiga juhitav seade, mis suudab automaatselt täita erinevaid ülesandeid. Roboteid saab kasutada erinevatel eesmärkidel, sealhulgas tööstuslikus tootmises, meditsiinilises teeninduses, teadusuuringutes kosmoses ja merepõhjas, samuti kodustes ja meelelahutuslikes eesmärkides.
Esimene maailmas robot on tavaliselt Unimate. Unimate loodi 1961. aastal inseneride George David Mackenzie ja Joseph Engelberger’i poolt Ameerika Ühendriikides. Seda robotit kasutati tööstuses keevitamise ja detailide kokkupanemise ülesannete täitmiseks tootmisliinidel. See avas tee robotite laialdasemale kasutamisele tööstuses ning seda peetakse üheks varajaseks näiteks tööstusrobotist.
2. Robotite arendamise põlvkonnad. Nimeta ja selgita.
Robotite arendamisel eristatakse tavaliselt mitmeid põlvkondi, mis kajastavad tehnoloogilisi ja funktsionaalseid muutusi. Siin on peamised põlvkonnad robotite arengu ajaloos:
- Esimene põlvkond: tööstusrobotid, staatilised, täidavad lihtsaid mehaanilisi ülesandeid.
- Teine põlvkond: paindlikud, omavad täiendavaid funktsioone, suudavad kohanduda.
- Kolmas põlvkond: omavad laiendatud tehisintellekti ja autonoomia võimeid, suudavad ise õppida ja kohanduda uute olukordadega.
Elektri mõisted
Elekter on energia vorm, mis on seotud elektriliselt laetud osakeste, näiteks elektronide ja prootonite, liikumise või potentsiaaliga. See mängib olulist rolli paljude meie elu aspektide juures, alates valgustamisest ja kütmisest kuni paljude seadmete ja tehnoloogiate toimimiseni. Looduses avaldub elekter erinevates vormides, sealhulgas staatiline elekter, elektriväljad ja voolud, mis liiguvad läbi juhtmete. Elektrit uuritakse ka füüsika ja inseneriteaduse valdkonnas, et arendada ja täiustada selle kasutamisega seotud tehnoloogiaid.
Hüdraulikasüsteem
Hüdraulikasüsteem on energia edastamise süsteem, mis kasutab rõhu all olevat vedelikku. See koosneb pumpast, vedelikust (tavaliselt õli või vesi), torustikest, klappidest, silindritest ja muudest komponentidest. Hüdraulikasüsteemi tööpõhimõte seisneb surve edastamises pumpast vedeliku kaudu mehhanismidele, mida tuleb juhtida. See võimaldab teostada erinevaid tööde liike, nagu kaalu tõstmine ja liigutamine, mehhanismide liikumise juhtimine ning tegevused erinevates tööstuslikes, ehituslike ja autotehnikates. Hüdraulikasüsteemid on tavaliselt tuntud oma kõrge efektiivsuse, usaldusväärsuse ja suure jõu edastamise võime poolest.
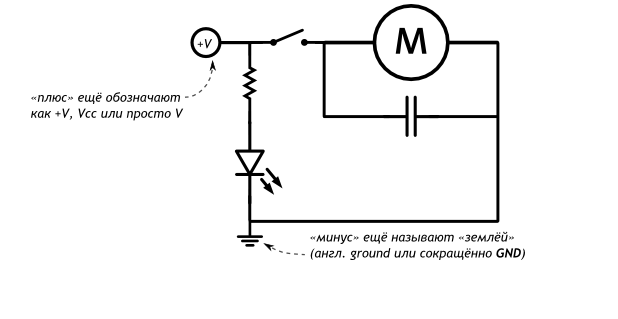
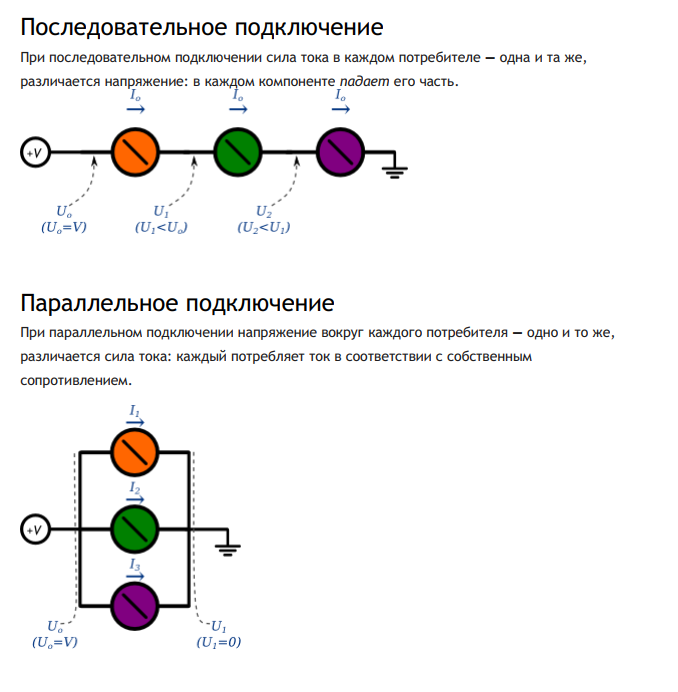
Elektriline ahel
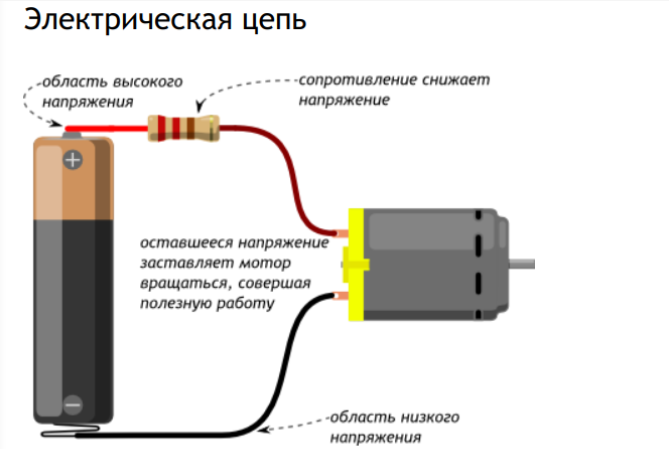
Elektriline ahel on suletud tee, mille kaudu saavad elektrilised laadimised vabalt liikuda. See hõlmab elektrienergia allikat (näiteks akut või generaatorit), juhtmeid (tavaliselt metalltraate), juhtimisseadmeid (näiteks lüliteid) ja energia tarbijaid (näiteks lambid või mootorid). Elektrilises ahelas saab vool, mis koosneb laadimiste voolust, liikuda allikast tarbijani, tehes teel tööd. Elektrilised ahelad võivad olla nii lihtsad, koosnedes mõnest elemendist, kui ka keerukad, hõlmates palju komponente.е количество компонентов.
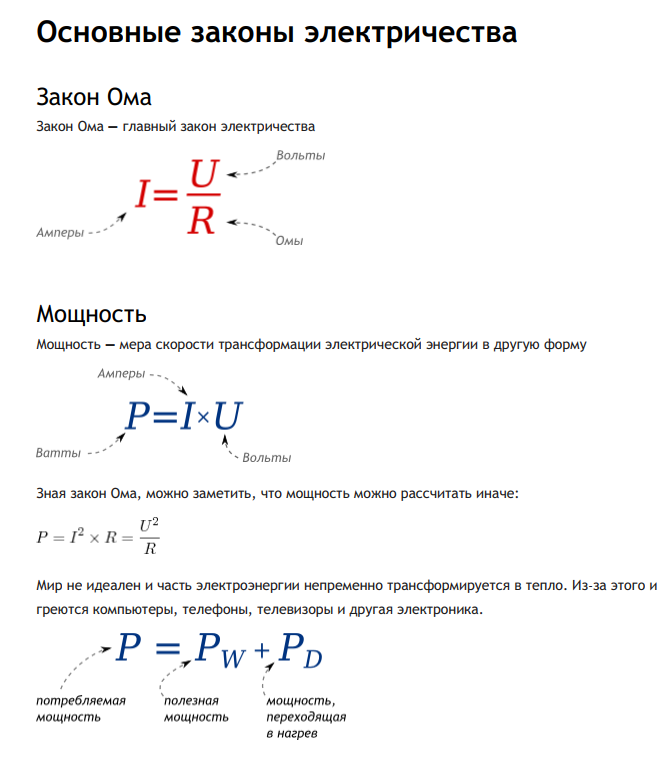
| Под действием напряжения источника питания | U | Вольт |
| По проводникам и компонентами разного сопротивления | R | Ом |
| От высокого потенциала | + | плюс |
| К низкому потенциалу | – | минус |
| Переносится заряд | Q | кулон |
| Формируя электрический ток определенный силы | I | ампер |
| Который совершает полезную работу | W | джоуль |
| Превращаясь в другую энергию с некой скоростью | P | ватт |
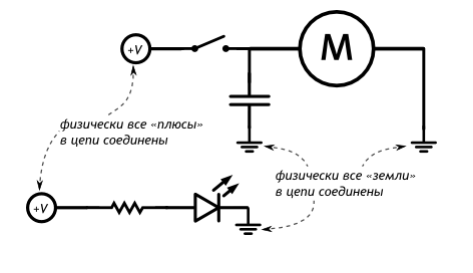
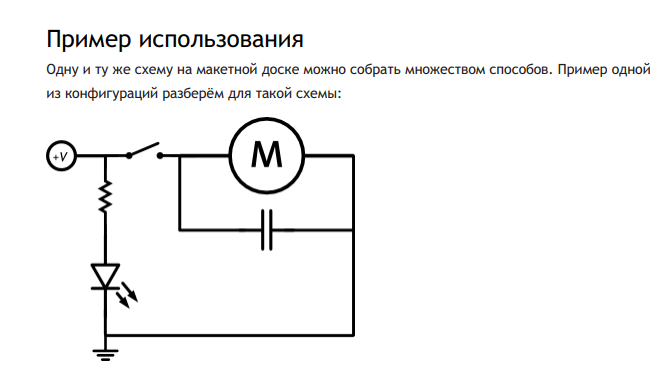
Põhiahel ilma selge toiteallikata
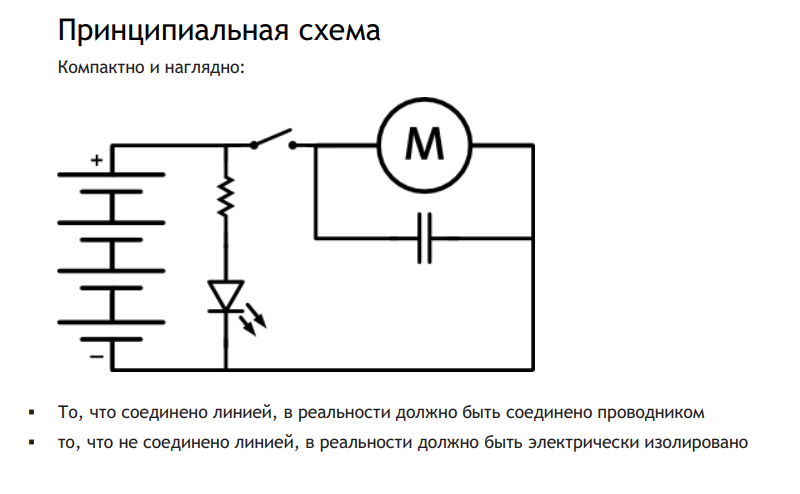
Toiteplokk pole sageli selgelt märgistatud, vaid kasutatakse eraldi pluss- ja miinusmärke. See skeem on veelgi kompaktsem.
Elektriskeem eraldi vooluringidega
Sageli on mugavuse huvides üks skeem diagrammides jagatud eraldi osadeks. Keerulistes projektides saavutavad nad nii nähtavuse ja jagavad vastutusvaldkonnad mitme arendusinseneri vahel.
Elektrimajandus
Kui elekter muudetakse pidevalt ja monotoonselt teisele kujule, on elektrienergia ulatus oluliselt piiratud. Kui õpite elektrit juhtima ja sellega suhtlema, avaneb tohutu maailm erinevaid kasulikke seadmeid. Selleks on mitu võimalust.
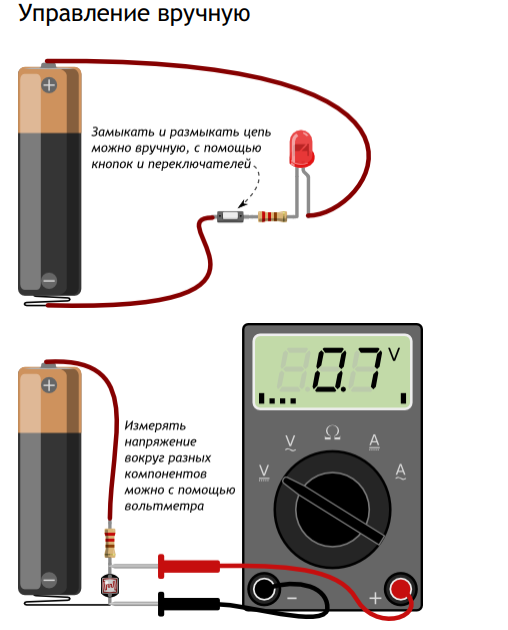
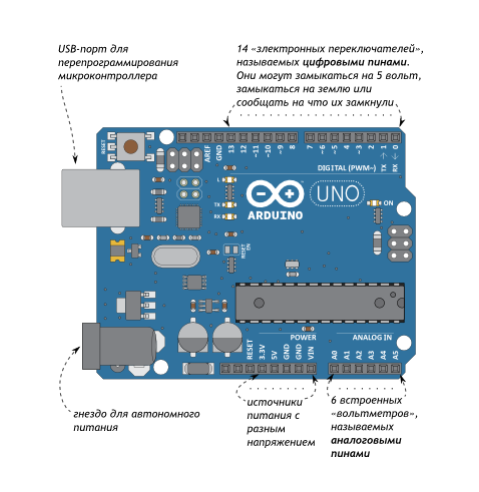
Automaatne juhtimine
Ahelat on võimalik sulgeda ja avada, samuti mõõta pinget mitte käsitsi, vaid automaatselt, vastavalt etteantud algoritmile, kasutades programmeeritud mikrokontrollerit. Olemas on “toorikud” mikrokontrollerid, mis on valmistatud ühes mikroskeemis. Need on massiliselt toodetuna odavad, kuid nende programmeerimine ja õige ühendamine on algajatele keeruline ülesanne. Selle probleemi lahendamiseks on olemas valmis plaadid või, nagu öeldakse, arvutusplatvormid. Need muudavad mikrokontrolleriga suhtlemise protsessi väga lihtsaks. Tüüpiline esindaja sellest perest on Arduino plaadid.
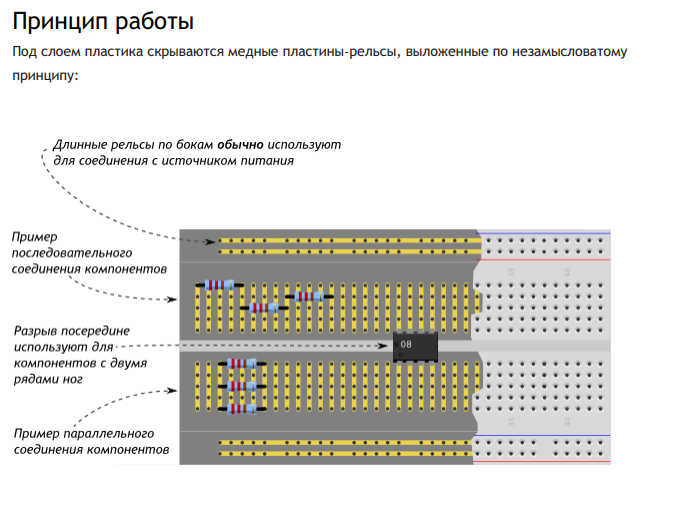
Kiire vooluahela kokkupanek
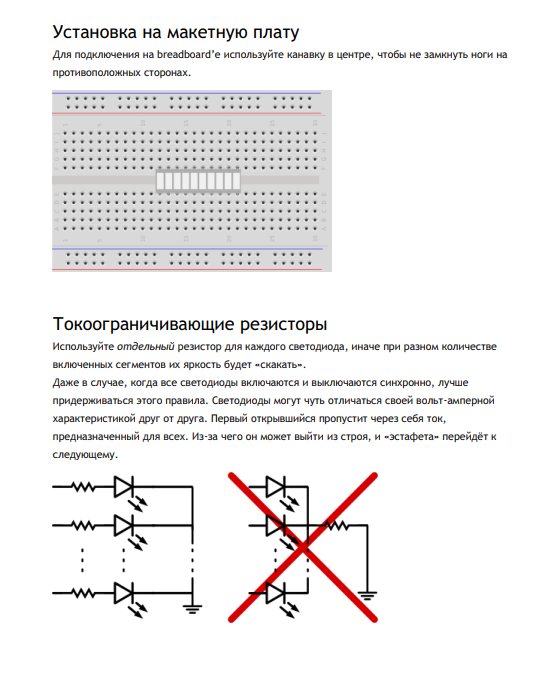
Seadmete usaldusväärseks kokkupanekuks luuakse individuaalsed trükkplaadid. Kui teete need ise, võtab see palju aega ja sunnib kemikaalide ja jootekolvi kallal nokitsema. Kohandatud tööstuslikud plaadid on väikestes kogustes äärmiselt kallid Elektriliste ahelate kiireks kokkupanemiseks ilma jootmiseta ja probleemideta. Seda nimetatakse ka leivalauaks, paigutuslauaks või leivalauaks.
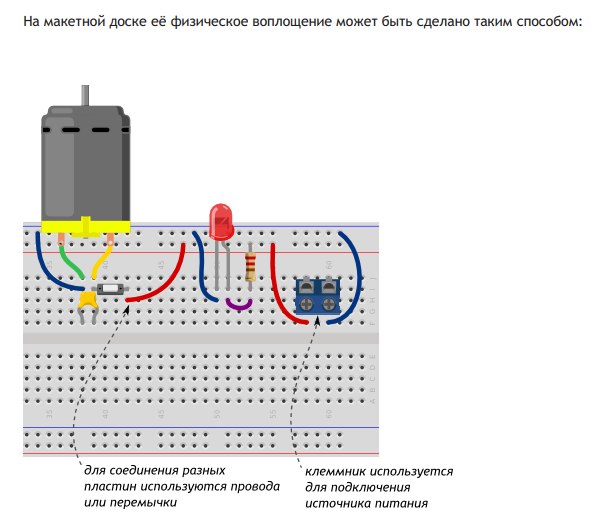
Millele tasub tähelepanu pöörata:
Juhtmete värvid ei oma loomulikult mingit tähtsust. Siiski on hea tava kasutada punaseid juhtmeid toitejoone jaoks ning musti või siniseid maajoonte jaoks.
Oleme toiteallika ühendanud pikkade külgrelssidega. See võimaldab mitte vedada palju juhtmeid erinevatelt skeemi aladelt toiteallika juurde, ning toiteallika asendamine või liigutamine muutub palju lihtsamaks.
Kogu skeemi asend maketiplaadil ei ole nii oluline. Oluline on komponentide omavaheline asend.
Skeem on horisontaalselt jagatud eraldi osadeks, mida on lihtne eraldi tajuda ja muuta.

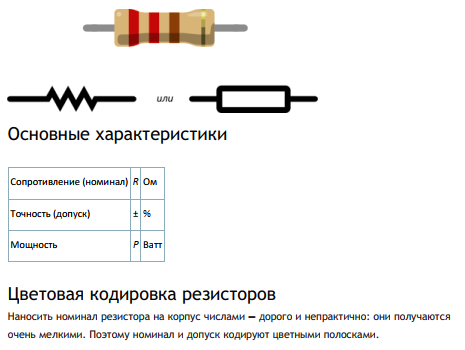
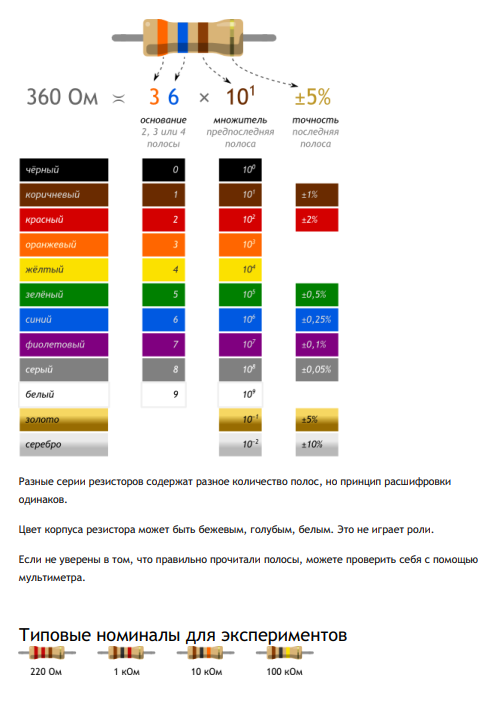
Takisti Takisti on kunstlik “takistus” voolule. Vastupidavus kõige puhtamal kujul. Takisti piirab voolu, muutes osa elektrist soojuseks.
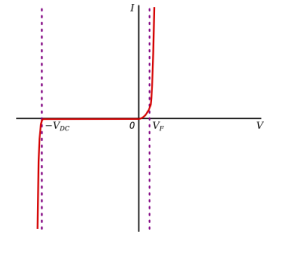
Voolu-pinge tunnusjoon
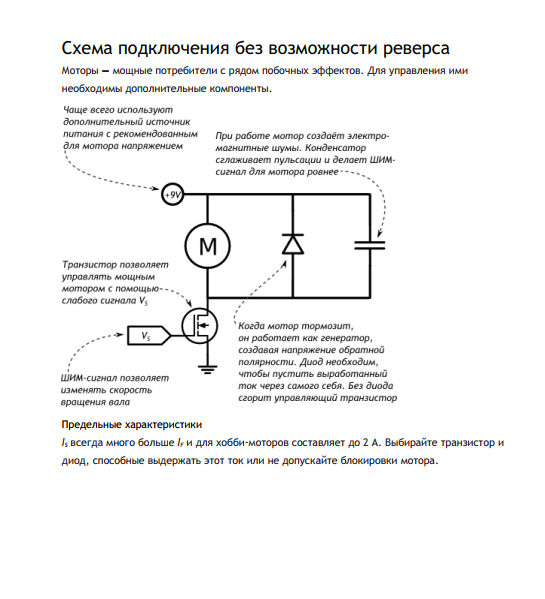
Pärast seda, kui pinge edasisuunas ületab väikese läve, avaneb VF-diood ja hakkab peaaegu vabalt läbima voolu, mis tekib allesjäänud pingega. Kui pinget rakendada vastupidises suunas, hoiab diood voolu kuni teatud kõrgepinge VDC-ni, misjärel see murrab läbi ja töötab samamoodi nagu edasisuunas.

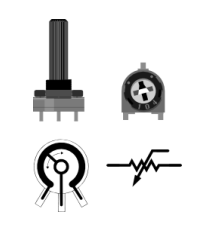
Potentsiomeetrit nimetatakse ka muutuvaks takistiks või trimmeriks. See on kahe takisti jagaja ühes korpuses. Seetõttu on sellel 3 jalga: võimsus, väljund, maandus R1 ja R2 suhet muudetakse nuppu keerates. 100% R1 kasuks kuni 100% R2 kasuks.